MoveIt! (Standalone)
In this section we’ll launch the MoveIt! stack demonstration in stand-alone simulation mode. MoveIt is a very powerful planning framework built into ROS which allow the robot to plan around obstacles in the environment, among other things.
With the svenzva_ros stack installed, launch the svenzva_moveit demo file in simulation mode with:
roslaunch svenzva_moveit demo.launch simulation:=true
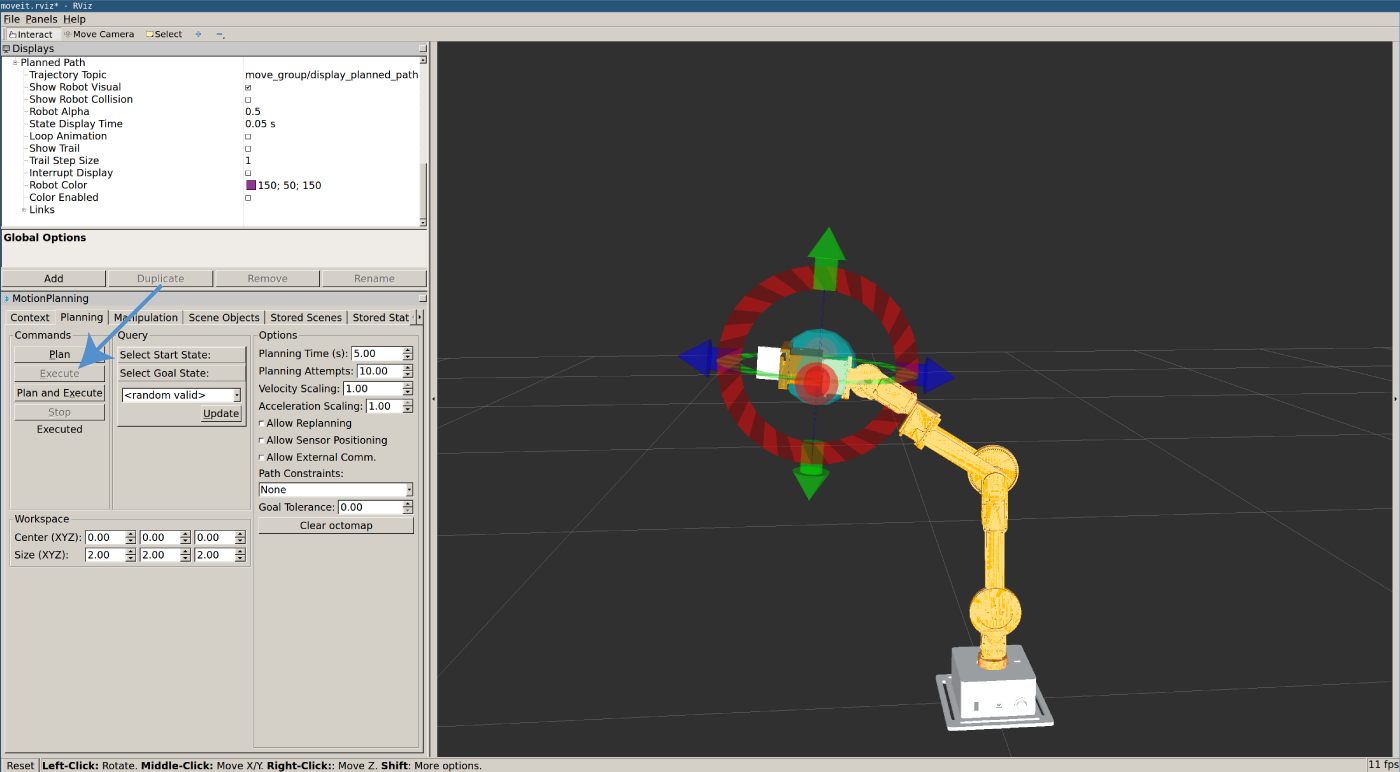
This launches MoveIt! and opens a RViz window with MoveIt!’s planning plugins. This is what the RViz window looks like.
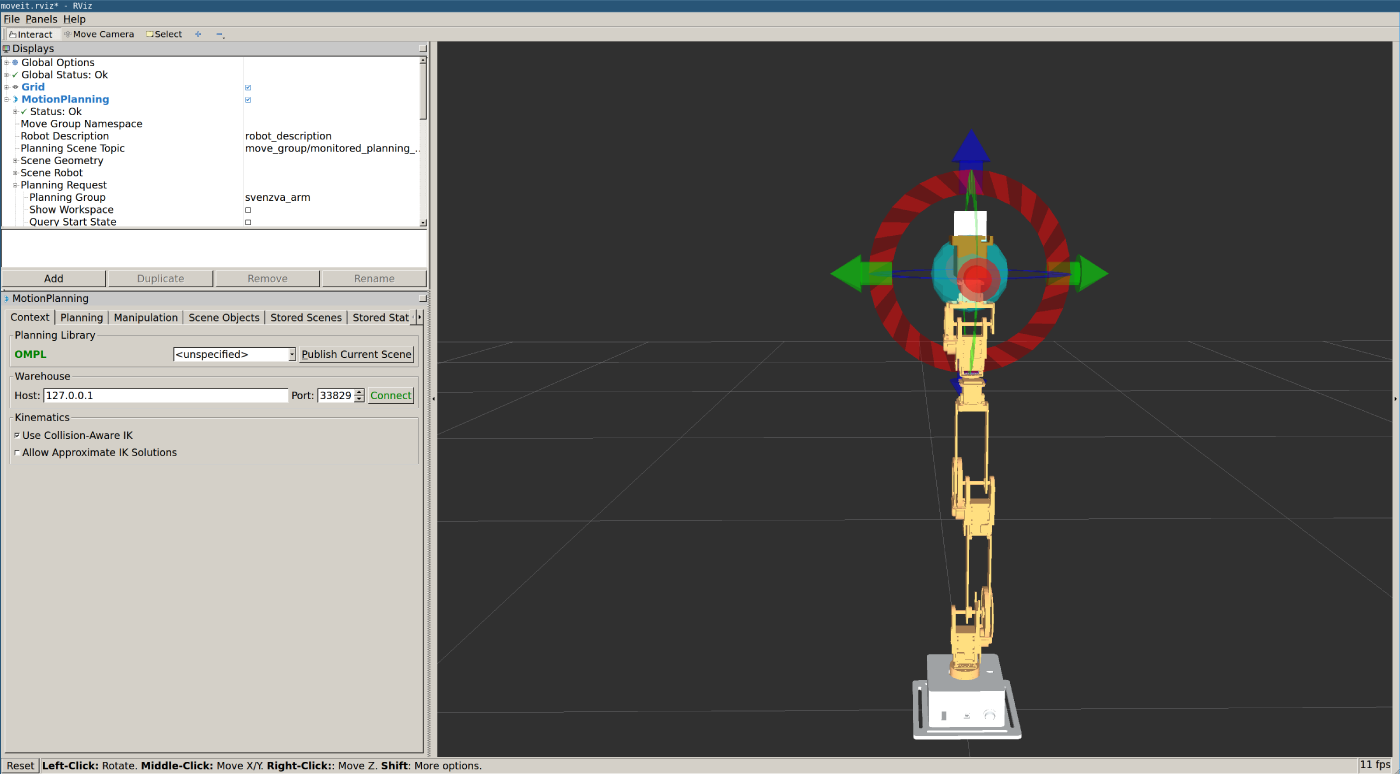
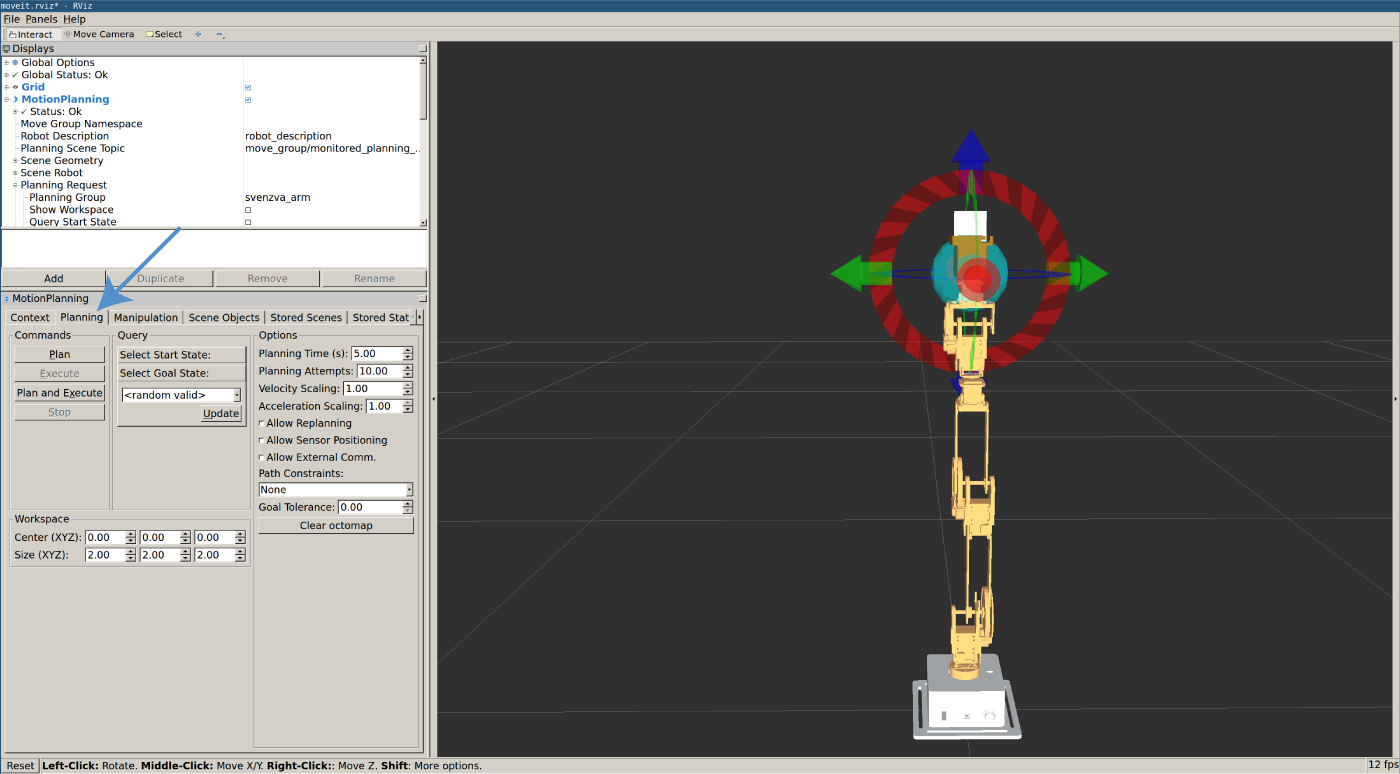
We see the arm in its all-zero configuration. Next we can try invoking MoveIt! to make a plan. Click the Planning tab.
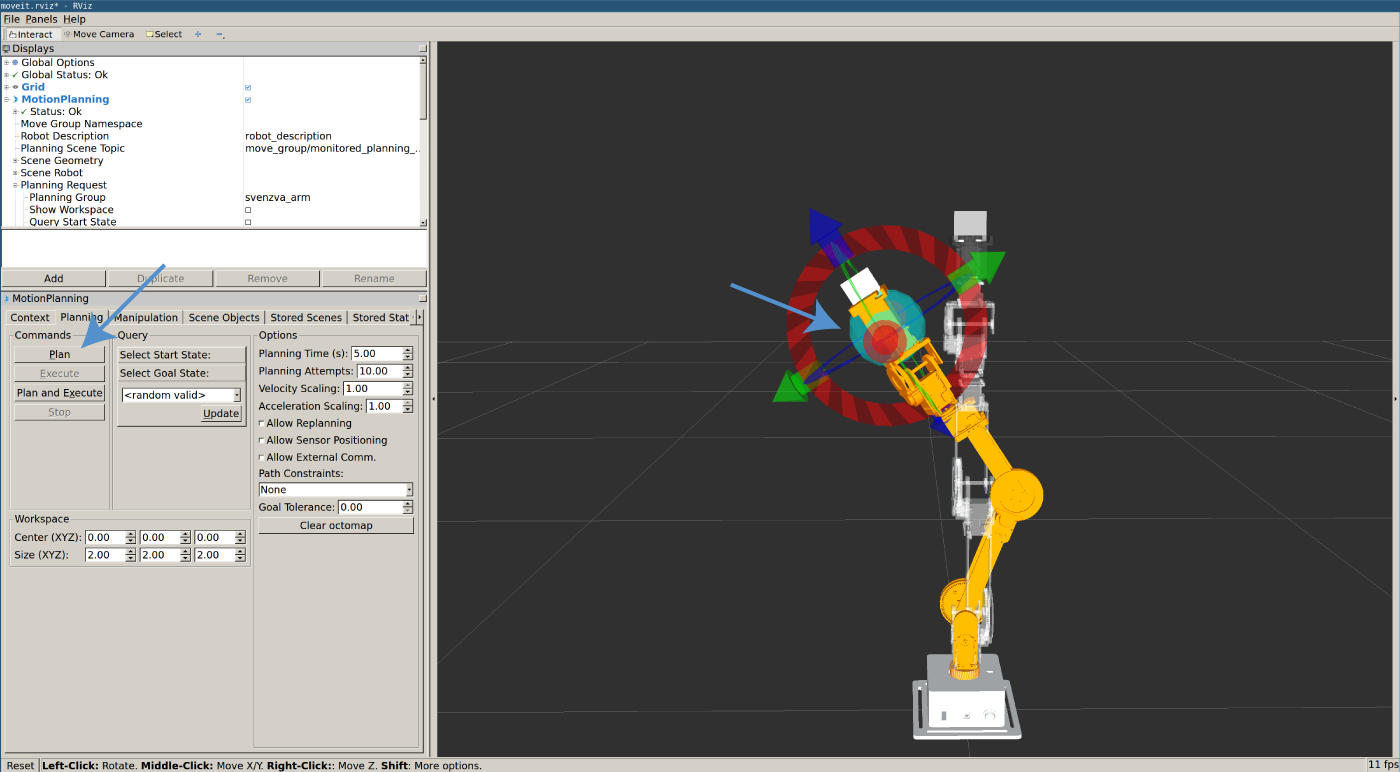
We can move the arm by clicking and dragging the blue interactive marker near the robot’s gripper. You’ll see the robot in orange follow the marker around. That is the target goal position that MoveIt! will solve for. You can see the current state of the robot in semi-opaque white.
Once you’re ready to plan to the new pose, click the Plan button.
If MoveIt! was able to plan successfully, you’ll see an outline of the path the arm will take.
Finally, we can make the arm actually move to that pose by clicking the Execute button. This will make the simulated arm follow the plan MoveIt! generated.
Running MoveIt on the Revel robot
The steps for running MoveIt! when the arm is connected are very similar. Running any MoveIt! plans in simulation will translate 1-1 on the real robot, because this simulation does not attempt to emulate dynamics- only kinematics.
You can launch this demo and also control MoveIt! programmatically, ie without needing to specify poses & planning by hand. Instead, you can use the forward and inverse kinematic services exposed by MoveIt! For more information on this, check out MoveIt! documentation.